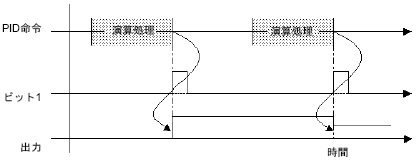
PID命令処理の完了フラグ(変数名.Q)
演算処理が終了して、オペランドD1に値を出力するタイミングで .QがONになります。PID命令処理の完了フラグは、1スキャン実行の間ONします。
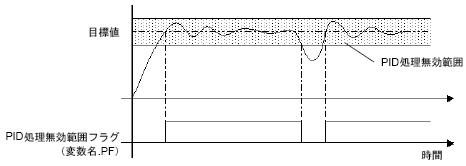
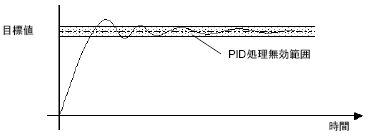
処理無効範囲フラグ(変数名.PF)
PID変数のメンバ指定(処理無効範囲 変数名.PF)で指定した範囲内において、現在値が目標値に達したときにONになり、現在値が範囲外となったときOFFになります。
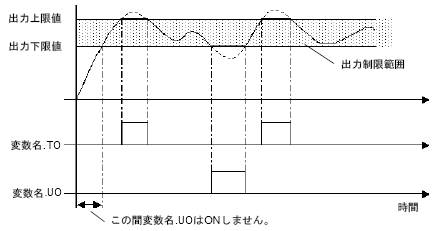
出力値の上限オーバーと下限オーバー(変数名.TO、変数名.UO)
PID命令をダブルクリックすることにより、PID変数の出力範囲を設定するダイアログが表示されます。設定された出力値に対して演算結果が超えた場合は、変数名.TOがONになり、設定された下限値以下の場合は、変数名.UOがONになります。各ステータスのビットがONになってもPID演算は続行され、設定した上限値または下限値で出力されます。
積分範囲設定(変数名 .IF)
PID命令をダブルクリックすることにより、PID命令の実行範囲を設定するダイアログが表示されます。設定された積分範囲設定に対して範囲外の場合、変数名.IFがONになります。各ステータスの積分範囲設定は、設定された範囲内のみ積分処理を実行する設定項目になります。
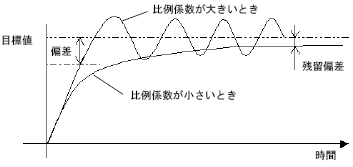
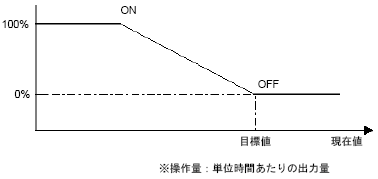
比例係数(変数名.KP)
比例係数(変数名.KP)を設定することにより、目標値と現在値との偏差に比例した操作量が出力されます。
比例係数を小さくすると、目標値に近づけようとする操作量は小さくなり、オーバーシュートをなくしますが、残留偏差が大きくなる原因になります。また、比例係数を大きくすると目標値に近づけようとする操作量は大きくなり目標到達時間は短くなりますが、ハンティングする原因になります。
設定範囲 0.01~100.00
内部データは整数変数になり、小数点は設定できません。
よって、0.01の設定の場合は、0.01x1000=10を設定してください。
1000倍した値を変数名.KPに設定してください。 比例係数を0.00に設定した場合、0が出力されます。
![]()
比例制御では、現在値が目標値より小さければ操作量は100%で最大となり、目標値と現在値が一致(偏差なし)すると操作量が0%になります。
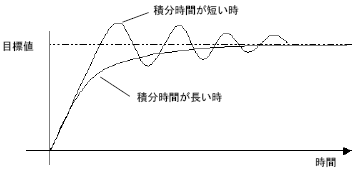
積分時間(変数名.TR)
積分時間(変数名.TR)を設定することにより、目標値までの偏差をなくすことができます。
比例制御だけでは、目標値に近づくと操作量が小さくなりすぎ、操作量(制御出力)が偏差を埋めるだけの値が得られなくなります。そのわずかな誤差を残留偏差といい、積分制御をもちいることによって、この残留偏差をなくすことができます。積分制御では、偏差を時間的に累積して、ある大きさになれば操作量を増して偏差をなくすように調節する制御方式です。積分時間を短くすると、目標値に近づけようとする操作量は大きくなり目標到達時間は短くなりますが、オーバーシュート、ハンティングの原因となります。また、積分時間を長くすると、目標値に近づけようとする操作量は小さくなりオーバーシュート、ハンティングをなくしますが、目標到達時間は長くなります。
積分時間は、積分処理を何秒単位で実行するのか、処理間隔の時間を設定します。
設定範囲 0.01~3000.00 (S)
内部データは整数変数になり、小数点は設定できません。
よって、0.1の設定の場合は、0.1x1000=100を設定してください。
1000倍した値を変数名.TRに設定してください。積分時間を0に設定した場合、積分処理は実行されません。
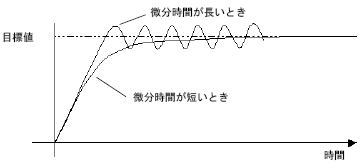
微分時間(変数名.TD)
微分時間(変数名.TD)を設定することにより、変化にすばやく対応することができます。
一定の時間(時定数)を必要とする比例制御や積分制御では、外乱に対してすばやく反応できず、すぐには元の目標値には戻せません。微分制御では、外乱に対して偏差を見て、前回偏差との差が大きいときには大きな操作量を与え、機敏に反応するように働きます。微分時間を長くすると、外乱に対しての復旧時間は短くなりますが、オーバーシュート、短い周期のハンティングの原因となります。また、微分時間を短くすると、オーバーシュート、ハンティングをなくしますが、外乱に対しての復旧時間は長くなります。
設定範囲 0.01 ~ 3000.00 (S)
内部データは整数変数になり、小数点は設定できません。
よって、0.1の設定の場合は、0.1x1000=100を設定してください。
1000倍した値を変数名 .TD に設定してください。微分時間を0.00に設定した場合、微分処理は実行されません。
処理無効範囲(変数名.PA)
「処理無効範囲」ではPID制御は行わず、最小出力の値を出力してハンティングのない滑らかな制御を行います。
バイアス(変数名.BA)
バイアス値(オフセット)を設定します。比例制御などで生じた残留偏差を少なくすることができます。

サンプリング時間(変数名.ST)
演算設定の周期で取得した、S2の値に対してノイズ除去を目的とします。前回のフィルタ結果と今回の取得データをもとに算出する移動平均です。サンプリング時間を設定することで、現在値のデータが思いもよらない値となっても、前回の測定データとの平均をとって演算するので出力値への影響は小さくなります。サンプリング時間は演算設定の周期より大きく設定してください。また、サンプリング時間を0に設定するとフィルタは無効になります。