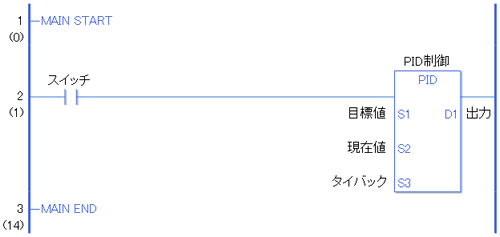
PID命令が導通すると、PID演算を行い操作量を調節して出力します(演算実行)。下図のように非導通の場合は一定の操作量を出力します。一定の操作量の出力値はS3で設定します。非道通の場合、出力が必要無ければ、定数の0を入力してください。
ロジックプログラムでPID命令を使用する際、まずPID変数のオペランド(HP)と整数変数のオペランド(S1、S2、S3、D1)に変数を割り付けてください。
PID変数
PID命令のオペランドHPに変数を割り付けると、その変数には自動的に各メンバが割り付けられます。
|
PID変数 |
変数設定 |
内容 |
|---|---|---|
|
変数名.Q |
ビット変数 |
PID命令処理の完了フラグ |
|
変数名.PF |
ビット変数 |
処理無効範囲フラグ |
|
変数名.UO |
ビット変数 |
出力値の下限オーバー |
|
変数名.TO |
ビット変数 |
出力値の上限オーバー |
|
変数名.IF |
ビット変数 |
積分範囲設定 |
|
変数名.KP |
整数変数 |
比例係数 |
|
変数名.TR |
整数変数 |
1回あたりの積分時間 |
|
変数名.TD |
整数変数 |
1回あたりの微分時間 |
|
変数名.PA |
整数変数 |
処理無効範囲 |
|
変数名.BA |
整数変数 |
バイアス(オフセット) |
|
変数名.ST |
整数変数 |
サンプリング時間 |
比例係数、積分時間、微分時間に代入される値は、「PIDモニタウィンドウ」から入力した場合と、プログラム上からPID変数の各メンバに入力する場合と見た目が異なります。プログラム上から入力する場合は、比例係数、積分時間、微分時間の場合は1000倍してください。
例)比例係数 0.1 x 1000→ 100
![]()
PID変数は、すべて保持型変数になります。PID命令は1プロジェクト内8個までになります。
PID変数 1 に対して、PID命令1になります。