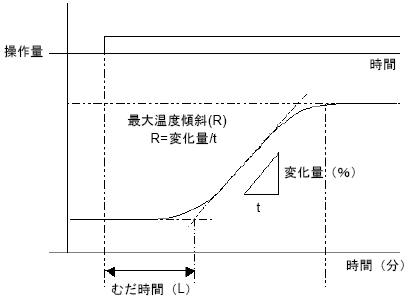
温度制御の場合を例にして説明します。PID の制御結果を最適なものにするためには、P(比例要素)、I(積分要素)、D(微分要素)の各定数を最適値にする必要があります。さまざまな制御対象に対して、PID定数を温度特性から導き出す方法としてステップ応答法があります。ただし、制御対象、用途によっては最適値にならない場合がありますので、そのときは、オンラインモニタを行い、PIDモニタウィンドウで調整してください。ステップ応答法目標値を設定して、制御対象に対して操作量100%をステップ状に出力します。このときの下表の温度特性グラフより、最大温度傾斜(R)とむだ時間(L)を計測します。
最大温度傾斜(R)とむだ時間(L)を計測した値を下記の方程式に代入して"比例係数"、"積分時間"、"微分時間"の定数を算出します。算出した値をPIDモニタウィンドウから数値を代入してください。
"比例係数" = 100/(0.83 x R x L) [%]
"積分時間" = "回数"*1= 1/(2 x L) [回/min]
"微分時間" = 0.5 x L [min]
*1 内部演算の関係で"積分時間"="回数"になります。